1. 马可夫链(Markov chain)
马可夫链(一阶)的定义为

对应的概率图模型如下

马可夫链的状态仅依赖于前一个状态
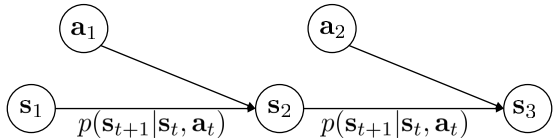
2. 马可夫决策过程(Markov decision process)
MDP的定义为
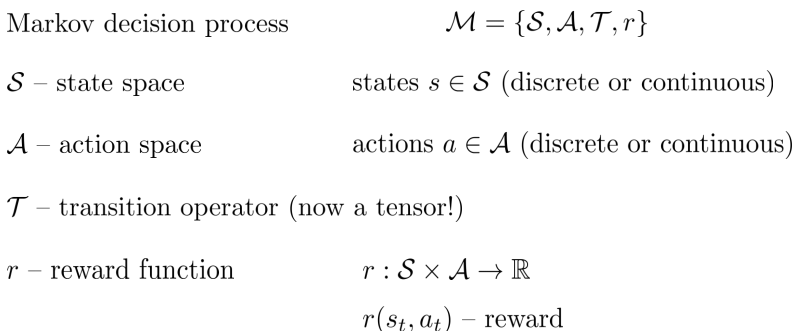
对应的概率图模型为
从MDP的定义可以得到以下的等式(Bellman equation)

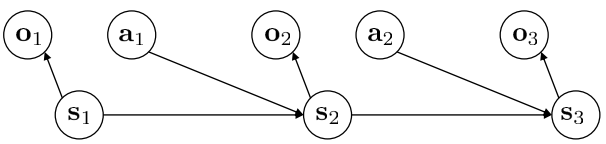
3. 部分观测马可夫决策过程(Partially observed Markov decision process)
POMDP的定义为
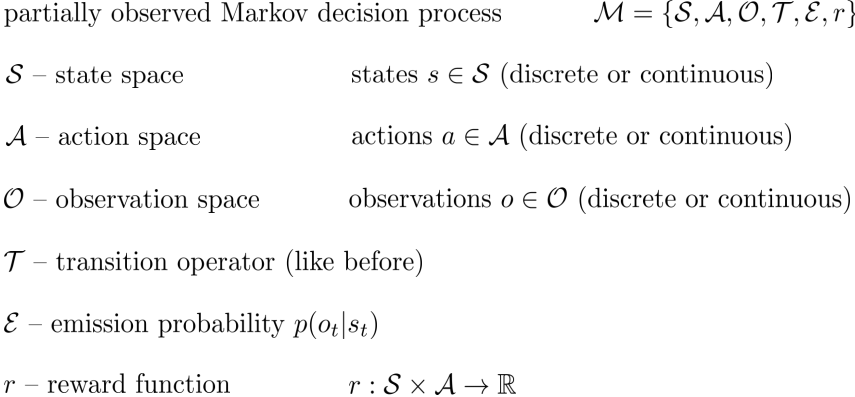
对应的概率图模型为
POMDP能够转化为MDP
4. 强化学习的目标
强化学习的过程如图所示
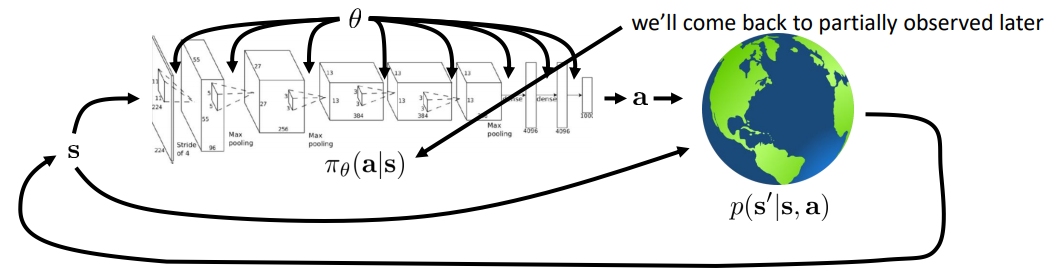
Agent通过策略 $ \pi $(policy,这里policy是通过神经网络表示)在当前状态s下选择动作a,之后,环境对agent的状态s和动作a进行相应,更新agent的状态到$ s^′ $,整个过程是一个MDP
从某个初始状态开始,可以得到agent一系列状态和动作(trajectory)的概率

而强化学习的目标是通过优化policy,从而使得trajectory对应的reward期望最大化
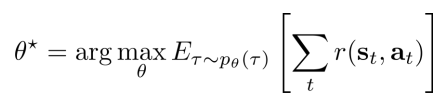
考虑agent的状态s和动作a的边缘概率(state-value margin),trajectory概率的形式可以写为

此时的概率图模型为
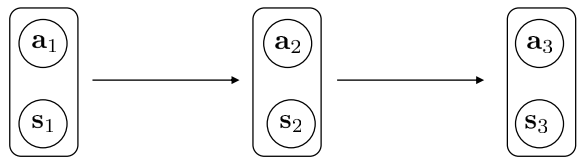
对应的转移概率为
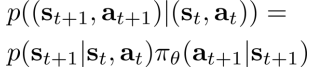
这种情况下,强化学习的目标可以改写为

考虑无穷的MDP,即 $T -> \infty$ 的情况
考虑马可夫平稳态
可知
即 $\mu $ 是转移矩阵Τ特征值1对应的特征根(几乎总是存在的)
称 $\mu$ 为MDP的稳态分布(stationary distribution)
因此,在 $\mu ->\infty $ 的情况下
强化学习的目标可以改写为

总结 强化学习的目标
- 有限的状态转移

- 无限的状态转移

In RL,we almost always care about expectations(reward function is usually not smooth, but expectation of reward can be smooth)
(因此,强化学习的目标函数是一个期望值,因此是可导的)
5. Q-function和value function
Q-function的定义如下

Q-function表示在 $ s_t $ 状态下采取动作 $ a_t $ 后总的reward的期望
Value function的定义如下

Value function表示 $ s_t $ 状态后总的reward的期望
由定义可知q-function和value function有如下的关系

且强化学习的目标可以写成最大化
Q-function和value function在很多的RL算法中都有使用,主要使用的出发点有如下两点
-
如果我们有policy $ \pi $ ,并且知道该policy下的Q-function值 $ Q^\pi (s, a) $ ,则可以通过以下方式优化当前的policy $ \pi ‘ $ (Q-learning的出发点)
当动作a满足  设置  易知,无论当前policy $\pi$ 如何,policy $\pi '$ 至少和 $\pi$ 一样好 -
计算梯度,增加一个好的动作a的概率(PG的出发点)
易知,当动作a满足  则动作a比该状态下所有动作的平均水平要好,因此当  可以通过修改策略policy,来增加policy选择动作a的概率
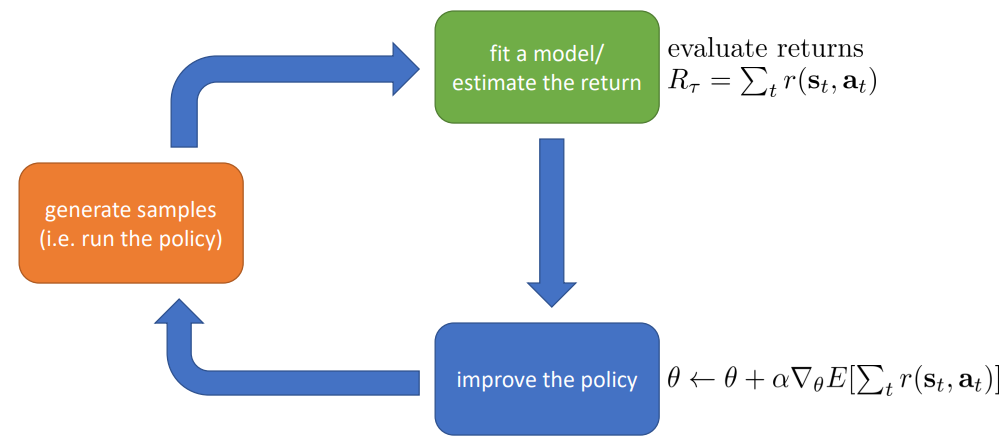
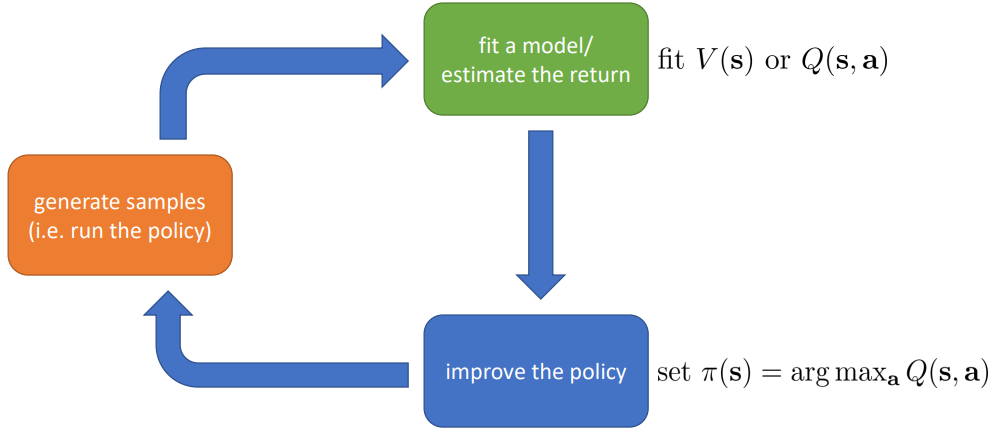
6. 强化学习算法类型
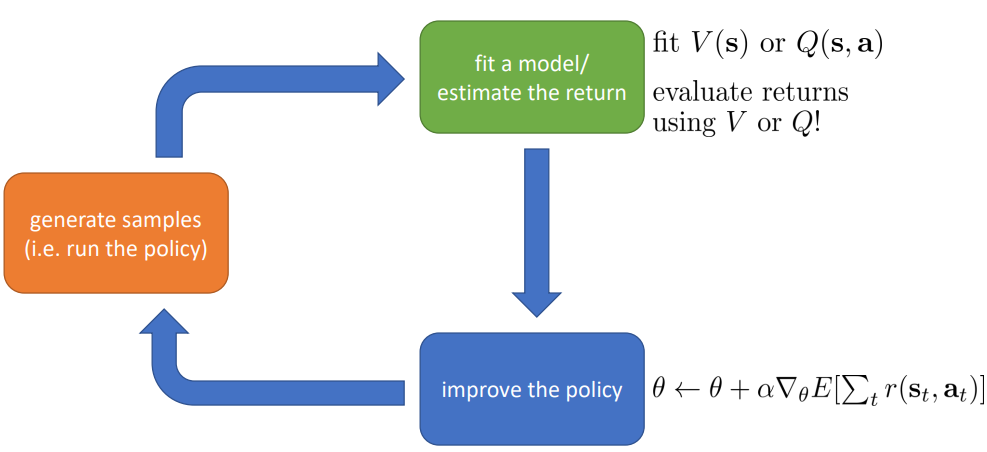
强化学习的基本步骤如下所示
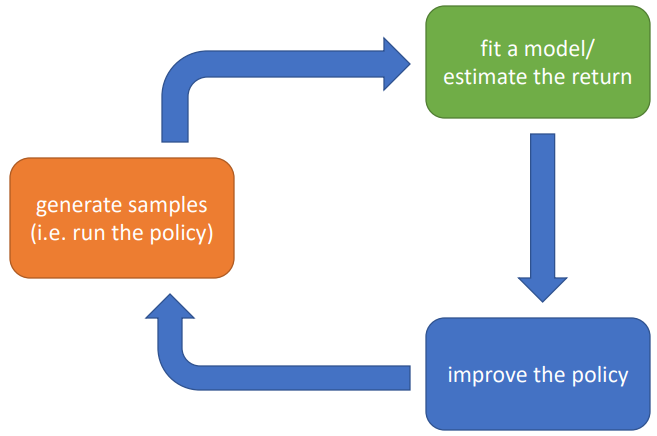
6.1 强化学习可分为以下类别
- Policy gradient.直接对强化学习的目标函数进行优化来更新policy
- Value-based.估计value function和q-function的值(no explicit policy)
- Actor-critic.估计value function和q-function的值,并根据这些值对policy进行更新(value function + policy gradient)
- Model-based RL(以上均为model-free).估计转移模型(transitino model),并使用转移模型进行
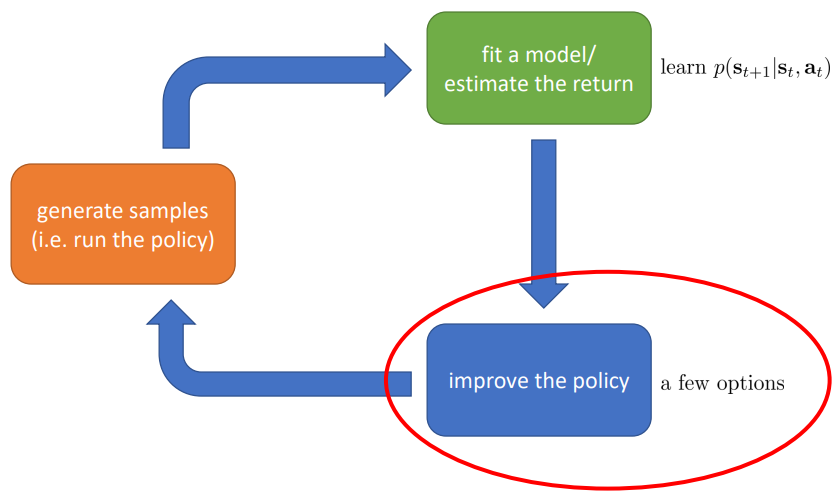
- planning(no explicit policy)
Trajectory optimization/optimal control
Discrete planning in discrete action spaces – e.g., Monte Carlo tree search
- 更新policy
通过一定的方式将误差反向传导到policy中
使用model学习value function
Dynamic programming
Dyna
6.2 不同类型算法类型下的典型算法
-
Value function fitting
-
Q-learing, DQN
-
Temporal difference learning
-
Fitted value iteration
-
-
Policy gradient
-
REINFORCE
-
Natural policy gradient
-
Trust region policy optimization
-
-
Actor-critic
- Asynchronous advantage actor critic(A3C)
-
Model-based
-
Dyna
-
Guided policy search
-
7. 强化学习算法的选择
不同的情况下,会选择不同的强化学习算法
-
不同的tradeoff
-
采样的效率
不同的算法有不同的采样效率
-
算法的稳定性和易用性
强化学习算法并不一定收敛,且收敛的结果不同,需要根据情况选择不同的算法
-
Value function fitting
最好情况下收敛到满足最小化Bellman error(并不等价于期望reward),最坏情况下,不一定收敛
-
Model-based RL
收敛到满足最小化Bellman error,但不能保证better model=better policy
-
Policy gradient
优化正确的目标
-
-
-
不同的假设
-
强化学习的目标是确定的还是基于概率的(Stochastic or deterministic)
-
状态和动作是连续的还是离散的(Continuous or discrete)
-
强化学习过程是会结束的还是不会结束的(Episodic or infinite horizon)
-
-
不同场景下不同算法的难度
有些场景下容易表示policy,但另一些场景下容易表示model
-
前一篇
Bi-Directional Attention Flow For Machine Comprehension -
后一篇
Sequence-to-Sequence Learning as Beam-Search Optimization