1. 来源
CVPR 2016
2. 作者信息
Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun
3. 概要
SPP-net以及Fast R-CNN通过减少重复的卷积计算来加快目标检测的速度,因此,候选区域的获取是目标检测的一个性能瓶颈。本文中提出了区域选取网络(Region proposal network,RPN)来取代原来的候选区域获取算法。RPN和目标检测网络共享卷积特征,并预测得到区域边界及其相应的分数。在实验中,Faster R-CNN能够取得更高的精度和更快的处理速度
4. 模型
Faster R-CNN的结构如下所示
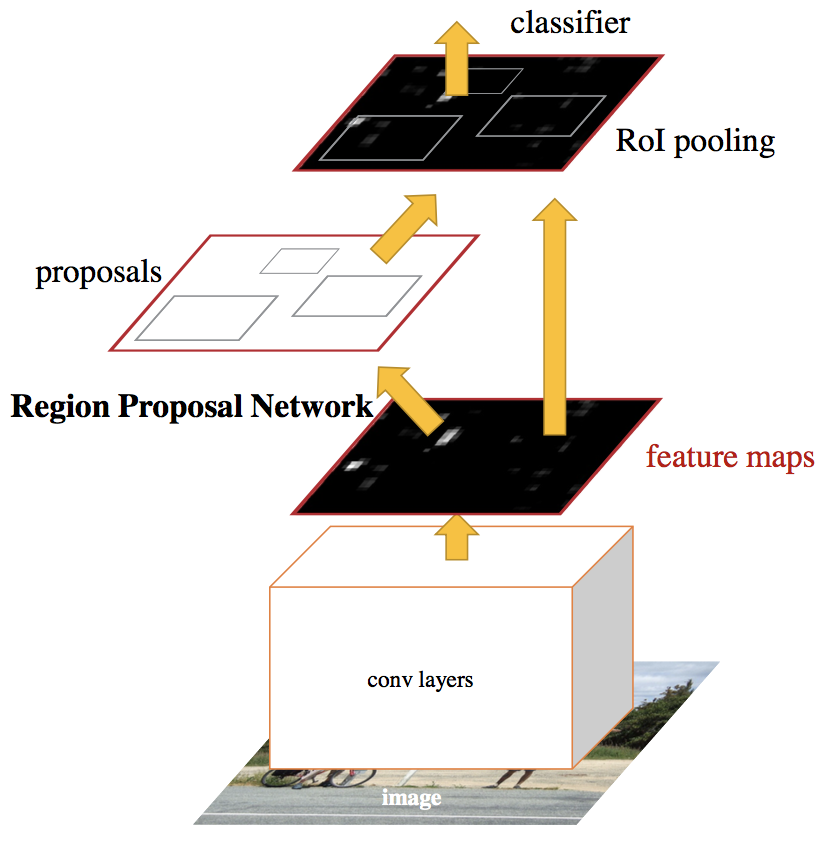
模型由两部分组成
4.1 Fast R-CNN目标检测网络
使用Fast R-CNN来进行目标检测
4.2 RPN网络
RPN为Fast R-CNN提供候选区域。
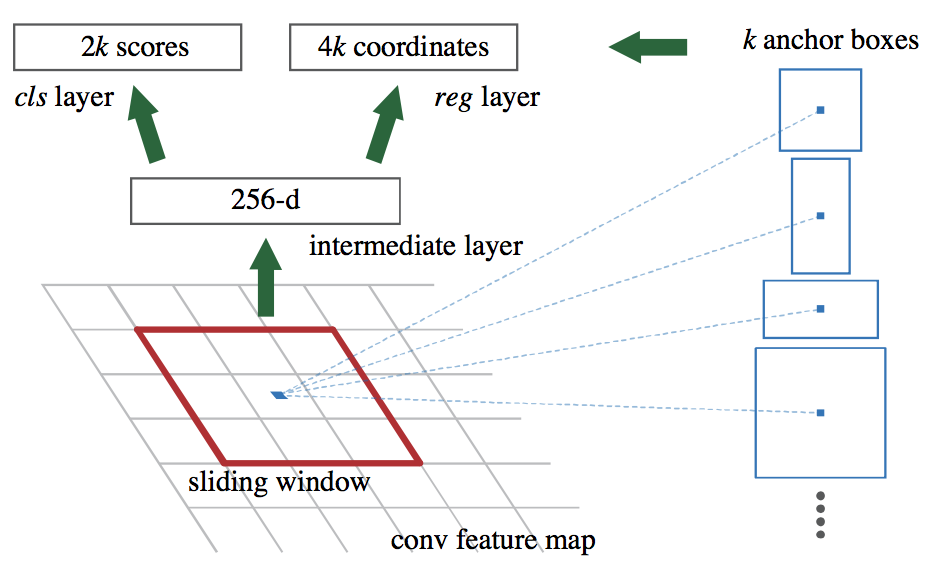
RPN和Fast R-CNN共享卷积层,其输入为卷积层产生的feature map。RPN采用了滑动窗口(大小为33),feature map中的窗口首先被映射成一个定长的特征,然后送入两种不同的全连接层(分类层和回归层)。每个窗口会对应产生k(本文中使用9)个不同的候选区域,每个候选区域的位置(x,y,w,h)由回归层得到,而其是否包含目标由分类器得到。从回归层得到的候选区域的位置之后,根据对应的k个anchor boxes(3种大小修改,3种长宽比修改)对其进行大小和长宽比的修改(得到的心得区域称为anchor),具体的做法是保持候选区域的中心位置不变,对候选区域的大小和长宽比进行修改。对于一个大小为WH的feature map,能够得到WHk个不同的anchor。
通过以上方法获取得到的候选区域(即anchor)有以下性质
-
平移不变形
图片中物体在平移后,仍然能够被检测到
-
多尺度的预测
传统的多尺度预测的方法包括
a. image/feature pyramid
有效,但是需要对每一个尺度计算feature maps,因此效率低
b. sliding window of multiple scales on feature map
采用不同大小的convolutional filer,因此也被称为pyramid of filters。
本文中使用了pyramid of anchor的做法,通过不同尺度的anchor在feature map上滑窗,不需要图像有多个尺寸,仅需要有多个尺寸的anchor就好了
RPN训练的目标函数为
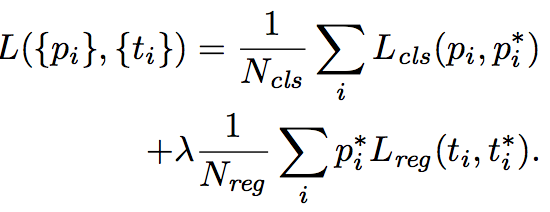
在其中的回归模型中,回归预测的变量是

4.3 训练
文本采用了4步交替训练的方式
-
训练RPN,网络使用预训练的卷积层参数(ImageNet-pretrained-model)进行初始化(不和Fast R-CNN共享)
-
训练Fast R-CNN,网络使用预训练的模型进行初始化,并且使用步骤1中产生的候选区域进行训练(不和RPN共享)
-
训练RPN,使用Fast R-CNN的共享卷积层参数进行初始化,但是训练过程中,固定共享卷积层参数,只对后续层进行fine-tune
-
训练Fast R-CNN,固定共享卷积层参数,只对后续层进行fine-tune
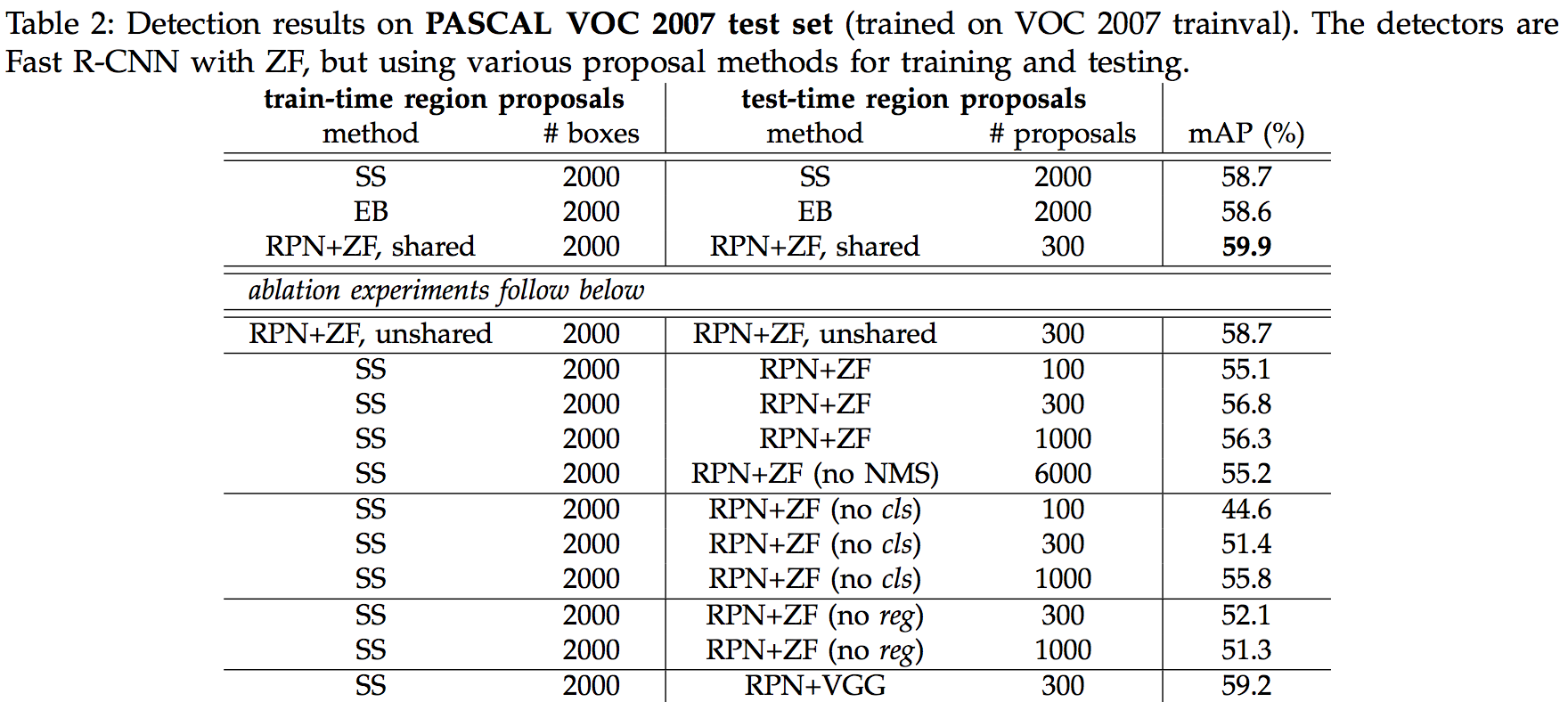
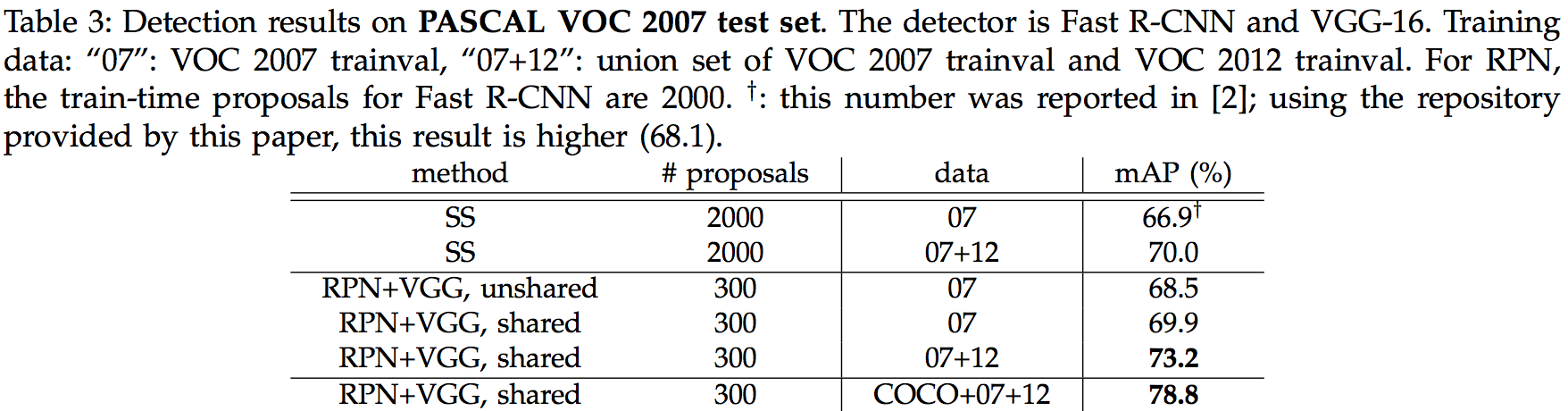
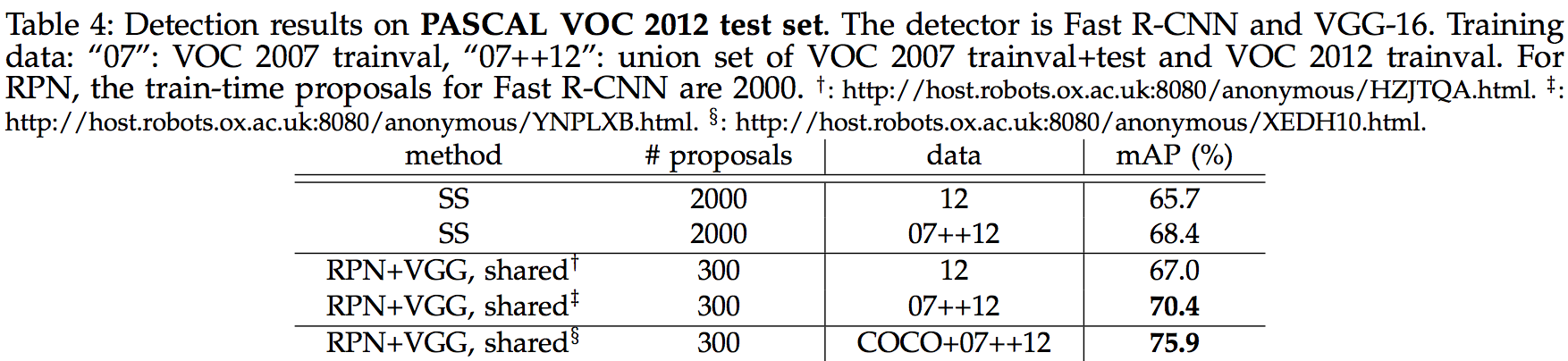
5. 实验结果
5.1 准确率
5.2 性能
